為什么選擇使用絕對(duì)值編碼器?
我們知道旋轉(zhuǎn)編碼器分為增量編碼器和絕對(duì)值編碼器。一般來說,絕對(duì)值編碼器比增量編碼器昂貴得多;絕對(duì)值編碼器分為單圈和多圈兩種。其中,多匝式也比單匝式昂貴得多。
那么使用絕對(duì)值編碼器,尤其是選擇多圈絕對(duì)值編碼器的意義在哪里呢?
先來簡(jiǎn)單回顧下有關(guān)這幾種編碼器的一些基本概念。
根據(jù)之前「編碼器的定義、用途和分類」一文所述,增量型與絕對(duì)值型編碼器的主要區(qū)別在于:
增量型編碼器是在機(jī)械軸旋轉(zhuǎn)時(shí),每旋轉(zhuǎn)經(jīng)過一個(gè)固定的角度間隔,交替輸出一組脈沖編碼;
絕對(duì)值型編碼器則始終是基于機(jī)械軸當(dāng)前所在的角度,持續(xù)輸出其旋轉(zhuǎn)位置編碼。
而單圈與多圈絕對(duì)值編碼器的區(qū)別,僅僅是在角度位置編碼輸出量程上的不同而已,前者的量程只有一圈,而后者可以做到多圈旋轉(zhuǎn)位置測(cè)量。
不過,這并不意味著在位置測(cè)量應(yīng)用中就一定要使用絕對(duì)值編碼器,也不是說在進(jìn)行長(zhǎng)距離位置檢測(cè)時(shí)就必須使用多圈絕對(duì)值編碼器。
事實(shí)上,對(duì)于很多傳動(dòng)和運(yùn)控設(shè)備應(yīng)用來說,即使是使用增量型編碼器或者單圈絕對(duì)值編碼器,也一樣是可以實(shí)現(xiàn)所謂的多圈位置檢測(cè)和記錄功能的。
這里就非常有必要先來討論一下編碼器的測(cè)量應(yīng)用場(chǎng)景了。
運(yùn)控和傳動(dòng)設(shè)備中的定位測(cè)量應(yīng)用,基本上可以分為距離測(cè)量和位置測(cè)量?jī)煞N類型。
對(duì)于距離測(cè)量應(yīng)用,從技術(shù)角度看,選用增量型和絕對(duì)型編碼器都是可以實(shí)現(xiàn)的,絕對(duì)值編碼器的優(yōu)勢(shì)更多是體現(xiàn)在精度性能等方面,而增量型編碼器則顯得更加經(jīng)濟(jì)、實(shí)用。
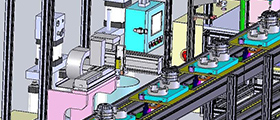
如上圖所示,若沒有特殊要求,在測(cè)量物料進(jìn)給距離時(shí),就沒有必要采用絕對(duì)值反饋,充其量為了提升測(cè)量精度,可以使用單圈絕對(duì)值編碼器。
而如果要實(shí)現(xiàn)對(duì)物體(如上圖中的 AXIS 0 切刀)的位置測(cè)量,就非常有必要考慮使用多圈絕對(duì)值型編碼器了,因?yàn)檫@將涉及到反饋編碼唯一性的問題。
反饋編碼的唯一性,指的是編碼器在一個(gè)特定的旋轉(zhuǎn)周期范圍內(nèi)不會(huì)出現(xiàn)重復(fù)的信號(hào)輸出,每個(gè)角度的位置編碼都是獨(dú)一無二的。
增量型編碼器在旋轉(zhuǎn)時(shí)總是在重復(fù)著相同的脈沖編碼(例如:正交 A/B 相增量型編碼器的輸出,永遠(yuǎn)都是 A/B 相 0/1 的編碼),所以其信號(hào)輸出是不具備唯一性的,
單圈絕對(duì)值編碼器,可以在機(jī)械軸旋轉(zhuǎn)一圈范圍內(nèi),做到位置信號(hào)輸出的唯一性;
而多圈絕對(duì)值編碼器則可以實(shí)現(xiàn)在其多圈旋轉(zhuǎn)范圍內(nèi)不出現(xiàn)重復(fù)的位置信號(hào)輸出。
無論是哪種絕對(duì)值編碼器,只要測(cè)量行程超出其圈數(shù)范圍,就一定會(huì)在旋轉(zhuǎn)過程中,以量程圈數(shù)為周期不斷輸出重復(fù)的位置編碼。
因此,盡管都能夠完成長(zhǎng)距離位置測(cè)量任務(wù),但在選用不同類型編碼器時(shí),設(shè)備應(yīng)用體驗(yàn)卻大不相同。
使用增量型編碼器或者單圈絕對(duì)值編碼器,的確可以實(shí)現(xiàn)多圈位置檢測(cè)和記錄功能,但卻是需要依賴于設(shè)備系統(tǒng)的正常運(yùn)行才能夠順利完成的:
在使用增量型編碼器進(jìn)行位置測(cè)量時(shí),需要設(shè)備的信號(hào)輸入系統(tǒng),基于編碼器側(cè)反饋的連續(xù)重復(fù)脈沖,進(jìn)行位置計(jì)數(shù);
當(dāng)使用單圈絕對(duì)值型編碼器處理多圈位置應(yīng)用時(shí),同樣需要設(shè)備系統(tǒng),在獲取反饋位置編碼的同時(shí),對(duì)旋轉(zhuǎn)圈數(shù)進(jìn)行累加計(jì)算;
這樣一來,設(shè)備運(yùn)行時(shí)各種可能發(fā)生的意外狀況,如:控制程序運(yùn)行異常、系統(tǒng)與編碼器之間電氣連接的斷開、設(shè)備故障或斷電停機(jī)、信號(hào)線路干擾 ... 等,都將造成檢測(cè)運(yùn)算中位置計(jì)數(shù)和圈數(shù)累加的錯(cuò)誤或清零,從而相當(dāng)于中斷了位置測(cè)量的進(jìn)程。
因此,一旦出現(xiàn)上述這些情況,就必須在系統(tǒng)恢復(fù)時(shí),對(duì)編碼器所在的位置軸,進(jìn)行原點(diǎn)校準(zhǔn)的初始化操作,這無疑延長(zhǎng)了設(shè)備的停機(jī)時(shí)間。
而如果使用絕對(duì)值編碼器(包括單圈 / 多圈)進(jìn)行位置測(cè)量,只要其目標(biāo)量程(即測(cè)量行程)在編碼器圈數(shù)范圍內(nèi),設(shè)備系統(tǒng)就可以無需進(jìn)行任何位置計(jì)數(shù)和圈數(shù)累加方面的算法處理,直接引用編碼器輸出的反饋數(shù)據(jù)。
換句話說,位置測(cè)量將僅取決于編碼器的反饋輸出,而與電氣控制系統(tǒng)無關(guān),無論出現(xiàn)上述哪種電氣系統(tǒng)方面的意外故障,都不會(huì)因中斷檢測(cè)運(yùn)算進(jìn)程,而影響最終位置測(cè)量結(jié)果。這將幫助用戶省去設(shè)備恢復(fù)運(yùn)行時(shí)那些復(fù)雜的原點(diǎn)校準(zhǔn)初始化操作,從而縮短設(shè)備的停機(jī)時(shí)間,提升產(chǎn)線的總體運(yùn)營(yíng)效率。
這種獨(dú)立、穩(wěn)定的位置檢測(cè)性能,其實(shí)就是使用(多圈)絕對(duì)值編碼器的意義和價(jià)值所在。
使用多圈絕對(duì)值編碼器,能夠避免因設(shè)備系統(tǒng)電氣原因(如斷電、信號(hào)開路...)而造成的位置測(cè)量進(jìn)程的中斷,但如果編碼器與目標(biāo)測(cè)量部件之間的機(jī)械連接發(fā)生了改變,同樣還是需要在設(shè)備安裝完成時(shí)或機(jī)械系統(tǒng)恢復(fù)正常連接后,進(jìn)行必要的原點(diǎn)校準(zhǔn)初始化操作的。
有人可能會(huì)說,一支多圈絕對(duì)值編碼器的價(jià)格太昂貴了,是普通增量型編碼器的好多倍。
可是話說回來,這所謂的“昂貴”,其實(shí)也就是多出了幾千塊的成本而已,并且還是一次性投入。而每次產(chǎn)線停機(jī)恢復(fù)過程中,因原點(diǎn)校準(zhǔn)初始化操作而損失的設(shè)備產(chǎn)能,怎么也得以萬(甚至十萬)為單位計(jì)算了吧,而且,這可是要長(zhǎng)期逐次累積的喲。
如此看來,在(多圈)絕對(duì)值編碼器上的投資回報(bào)應(yīng)該還是不錯(cuò)的吧......
編碼器有很多方法來實(shí)現(xiàn)絕對(duì)值位置反饋,最顯著的是多圈絕對(duì)值位置反饋。在后面的程序中,我們將繼續(xù)與您討論幾種不同類型的絕對(duì)值編碼器之間的應(yīng)用差異。









值編碼器?")
值編碼器?")
值編碼器?")
值編碼器?")
值編碼器?")
值編碼器?")
值編碼器?")
值編碼器?")
值編碼器?")
值編碼器?")
值編碼器?")
值編碼器?")
值編碼器?")
值編碼器?")
值編碼器?")
值編碼器?")
值編碼器?")
值編碼器?")
化傳動(dòng)系統(tǒng)有限公司")
 在線QQ
在線QQ 186-2947-6872
186-2947-6872 在線咨詢
在線咨詢

 info@motion-control.com.cn
info@motion-control.com.cn