編碼器的計數(shù)原理與電機測速原理
什么是編碼器
編碼器是一種用來測量機械旋轉(zhuǎn)或位移的傳感器。它能夠測量機械部件在旋轉(zhuǎn)或直線運動時的位移位置或速度等信息,并將其轉(zhuǎn)換成一系列電信號。
光電編碼器
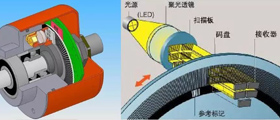
光電編碼器是一種通過光電轉(zhuǎn)換將輸出軸上的機械幾何位移量轉(zhuǎn)換成脈沖或數(shù)字量的傳感器。這是目前應(yīng)用最多的傳感器,光電編碼器是由光源、光碼盤和光敏元件組成。
光柵盤是在一定直徑的圓板上等分地開通若干個長方形孔。由于光電碼盤與電動機同軸,電動機旋轉(zhuǎn)時,光柵盤與電動機同速旋轉(zhuǎn),經(jīng)發(fā)光二極管等電子元件組成的檢測裝置檢測輸出若干脈沖信號,通過計算每秒光電編碼器輸出脈沖的個數(shù)就能反映當(dāng)前電動機的轉(zhuǎn)速。
此外,為判斷旋轉(zhuǎn)方向,碼盤還可提供相位相差90°的兩路脈沖信號。

霍爾編碼器
霍爾編碼器是一種通過磁電轉(zhuǎn)換將輸出軸上的機械幾何位移量轉(zhuǎn)換成脈沖或數(shù)字量的傳感器。
霍爾編碼器是由霍爾碼盤(磁環(huán))和霍爾元件組成。
霍爾碼盤是在一定直徑的圓板上等分地布置有不同的磁極。霍爾碼盤與電動機同軸,電動機旋轉(zhuǎn)時,霍爾元件檢測輸出若干脈沖信號,為判斷轉(zhuǎn)向,一般輸出兩組存在一定相位差的方波信號。

增量式編碼器
增量式編碼器是將設(shè)備運動時的位移信息變成連續(xù)的脈沖信號,脈沖個數(shù)表示位移量的大小。其特點如下:
1、只有當(dāng)設(shè)備運動時才會輸出信號。
2、一般會輸出通道A和通道B 兩組信號,并且有90° 的相位差(1/4個周期),同時采集這兩組信號就可以計算設(shè)備的運動速度和方向。
如下圖,通道A和通道B的信號的周期相同,且相位相差1/4個周期,結(jié)合兩相的信號值:
1、當(dāng)B相和A相先是都讀到高電平(1 1),再B讀到高電平,A讀到低電平(1 0),則為順時針轉(zhuǎn)
2、當(dāng)B相和A相先是都讀到低電平(0 0),再B讀到高電平,A讀到低電平(1 0),則為逆時針轉(zhuǎn)
3、除通道A、通道B 以外,還會設(shè)置一個額外的通道Z 信號,表示編碼器特定的參考位置
如下圖,傳感器轉(zhuǎn)一圈后Z 軸信號才會輸出一個脈沖,在Z軸輸出時,可以通過將AB通道的計數(shù)清零,實現(xiàn)對碼盤絕對位置的計算。
增量式編碼器只輸出設(shè)備的位置變化和運動方向,不會輸出設(shè)備的絕對位置。

絕對式編碼器
絕對式編碼器在總體結(jié)構(gòu)上與增量式比較類似,都是由碼盤、檢測裝置和放大整形電路構(gòu)成,但是具體的碼盤結(jié)構(gòu)和輸出信號含義不同。
它是將設(shè)備運動時的位移信息通過二進制編碼的方式(特殊的碼盤)變成數(shù)字量直接輸出。其特點如下:
1、其碼盤利用若干透光和不透光的線槽組成一套二進制編碼,這些二進制碼與編碼器轉(zhuǎn)軸的每一個不同角度是唯一對應(yīng)的。
2、絕對式編碼器的碼盤上有很多圈線槽,被稱為碼道,每一條(圈)碼道內(nèi)部線槽數(shù)量和長度都不同。它們共同組成一套二進制編碼,一條(圈)碼道對應(yīng)二進制數(shù)的其中一個位(通常是碼盤最外側(cè)的碼道表示最低位,最內(nèi)側(cè)的碼道表示最高位)。
3、碼道的數(shù)量決定了二進制編碼的位數(shù),一個絕對式編碼器有N 條碼道,則它輸出二進制數(shù)的總個數(shù)是2的N次方個。
4、讀取這些二進制碼就能知道設(shè)備的絕對位置,所以稱之為絕對式編碼器。
5、編碼方式一般采用自然二進制、格雷碼或者BCD 碼等。
自然二進制的碼盤易于理解,但當(dāng)碼盤的制造工藝有誤差時,在兩組信號的臨界區(qū)域,所有碼道的值可能不會同時變化,或因為所有傳感器檢測存在微小的時間差,導(dǎo)致讀到錯誤的值。比如從000跨越到111,理論上應(yīng)該讀到111,但如果從內(nèi)到外的3條碼道沒有完全對齊,可能會讀到如001或其它異常值。
格雷碼(相鄰的兩個2進制數(shù)只有1個位不同)碼盤可以避免二進制碼盤的數(shù)據(jù)讀取異常,因為格雷碼碼盤的相鄰兩個信號組只會有1位的變化,就算制造工藝有誤差導(dǎo)致信號讀取有偏差,最多也只會產(chǎn)生1個偏差(相鄰信號的偏差)。

編碼器參數(shù)解析
分辨率
指編碼器能夠分辨的最小單位。
對于增量式編碼器,其分辨率表示為編碼器轉(zhuǎn)軸旋轉(zhuǎn)一圈所產(chǎn)生的脈沖數(shù),即脈沖數(shù)/轉(zhuǎn)(Pulse Per Revolution 或PPR)。
碼盤上透光線槽的數(shù)目其實就等于分辨率,也叫多少線,較為常見的有5-6000 線。
對于絕對式編碼器,內(nèi)部碼盤所用的位數(shù)就是它的分辨率,單位是位(bit),具體還分單圈分辨率和多圈分辨率。
精度
首先明確一點,精度與分辨率是兩個不同的概念。
精度是指編碼器每個讀數(shù)與轉(zhuǎn)軸實際位置間的最大誤差,通常用角度、角分或角秒來表示。
例如有些絕對式編碼器參數(shù)表里會寫±20′′,這個就表示編碼器輸出的讀數(shù)與轉(zhuǎn)軸實際位置之間存在正負20 角秒的誤差。
精度由碼盤刻線加工精度、轉(zhuǎn)軸同心度、材料的溫度特性、電路的響應(yīng)時間等各方面因素共同決定。
最大響應(yīng)頻率
指編碼器每秒輸出的脈沖數(shù),單位是Hz。計算公式為:
最大響應(yīng)頻率= 分辨率* 軸轉(zhuǎn)速/60
例如某電機的編碼器的分辨率為100(即光電碼盤一圈有100條柵格),軸轉(zhuǎn)速為120轉(zhuǎn)每分鐘(即每秒轉(zhuǎn)2圈),則響應(yīng)頻率為100*120/60=200Hz,即該轉(zhuǎn)速下,編碼器每秒輸出200個脈沖(電機帶動編碼器轉(zhuǎn)了2圈嘛)。
編碼器的信號輸出形式
對于增量式編碼器,每個通道的信號獨立輸出,輸出電路形式通常有集電極開路輸出、推挽輸出、差分輸出等。
對于絕對式編碼器,由于是直接輸出幾十位的二進制數(shù),為了確保傳輸速率和信號質(zhì)量,一般采用串行輸出或總線型輸出,例如同步串行接口(SSI)、RS485、CANopen 或EtherCAT 等,也有一部分是并行輸出,輸出電路形式與增量式編碼器相同。
碼盤測速原理
編碼器倍頻
編碼器倍頻是什么意思呢,比如某光柵編碼器一圈有N個柵格,理論上電機帶動編碼器轉(zhuǎn)一圈,只能輸出N個信號,通過倍頻技術(shù),可以實現(xiàn)轉(zhuǎn)一圈,卻能輸出N*n個信號,這里的n為倍頻數(shù)。
增量式編碼器輸出的脈沖波形一般為占空比50% 的方波,通道A 和B 相位差為90°。
1、如果只使用通道A計數(shù),并且只捕獲通道A的上升沿,則一圈的計數(shù)值=碼盤的柵格數(shù),即為1倍頻(沒有倍頻)
2、如果只使用通道A計數(shù),并且捕獲了通道A的上升沿和下降沿,則編碼器轉(zhuǎn)一圈的計數(shù)值翻倍,實現(xiàn)2倍頻
3、如果既使用通道A計數(shù),又使用通道B計數(shù),且都捕獲了上升沿和下降沿,則實現(xiàn)了4倍頻

假設(shè)某個增量式編碼器它的分辨率是600PPR,能分辨的最小角度是0.6°,對它進行4 倍頻之后就相當(dāng)于把分辨率提高到了600*4=2400PPR,此時編碼器能夠分辨的最小角度為0.15°。
M法測速
又叫做頻率測量法。該方法是在一個固定的時間內(nèi)(以秒為單位),統(tǒng)計這段時間的編碼器脈沖數(shù),計算速度值。M法適合測量高速。
假設(shè):
編碼器單圈總脈沖數(shù)為C(常數(shù))
統(tǒng)計時間為 T0 (固定值,單位秒)
該時間內(nèi)統(tǒng)計到的編碼器脈沖數(shù)為 M0(測量值)
則:轉(zhuǎn)速n(圈/秒)的計算公式為:
速n(圈/秒)的計算公式")
注意: 如何理解這個公式:
M0即統(tǒng)計時間內(nèi)有多少個編碼器脈沖,再除以統(tǒng)計時間 T0,即1s(單位時間)內(nèi)轉(zhuǎn)了多少圈
例如:統(tǒng)計時間T0為3s,在3s內(nèi)測得的脈沖數(shù) M0為60,而編碼器的單圈脈沖數(shù)C為20,則轉(zhuǎn)速n=60/(20*3)=1圈每秒
由于C 是常數(shù),所以轉(zhuǎn)速n 跟 M0成正比。這就使得:
1、在高速時,測量時 M0變大,可以獲得較好的測量精度和平穩(wěn)性
2、但在低速時(低到每個 T0內(nèi)只有少數(shù)幾個脈沖),此時算出的速度誤差就會比較大,并且很不穩(wěn)定。
如下圖,方波為編碼器某一通道輸出的脈沖。
當(dāng)轉(zhuǎn)速較高時,每個統(tǒng)計時間 T0內(nèi)的計數(shù)值較大,可以得到較準確的轉(zhuǎn)速測量值。
當(dāng)轉(zhuǎn)速較低時,每個統(tǒng)計時間 T0內(nèi)的計數(shù)值較小,由于統(tǒng)計時間的起始位置與編碼器脈沖的上升沿不一定對應(yīng),當(dāng)統(tǒng)計時間的起始位置不同時,會有一個脈沖的誤差(只統(tǒng)計上升沿時,最多會有1個脈沖誤差,統(tǒng)計上升沿和下降沿時,最多會有2個脈沖的誤差)。

通過倍頻提高單位時間測得的脈沖數(shù)可以改善M 法在低速測量的準確性(比如原本捕獲到的脈沖 M0只有4 個,經(jīng)過4 倍頻后,相同電機狀態(tài) M0變成了16 個),但也不能從根本上改變低速時的測量問題。
T法測速
又叫做周期測量法。這種方法是建立一個已知頻率的高頻脈沖并對其計數(shù)。T法適合測量低速。
假設(shè):
編碼器單圈總脈沖數(shù)為C(常數(shù))
高頻脈沖的頻率為 F0(固定值,單位Hz)
捕獲到編碼器相鄰兩個脈沖的間隔時間為 TE,其間的計數(shù)值為 M1(測量值)
則:轉(zhuǎn)速n 的計算公式為:
速n 的計算公式為")
如何理解這個公式:
1/ TE,即1s內(nèi)有多少個編碼器脈沖,再除以一圈的脈沖數(shù)C,即1s內(nèi)轉(zhuǎn)了多少圈
F0即1s內(nèi)的高頻脈沖數(shù)除以兩編碼器脈沖間的高頻脈沖數(shù),也即1s內(nèi)有多少個編碼器脈沖,再除以一圈的脈沖數(shù)C,即1s內(nèi)轉(zhuǎn)了多少圈
例如:高頻脈沖的周期是1ms,即頻率 F0為1000Hz,在編碼器的兩個脈沖之間,產(chǎn)生的高頻脈沖數(shù) M1為50個(即兩個編碼器脈沖的間隔 TE為0.05s),編碼器一圈的脈沖數(shù)C為20,則轉(zhuǎn)速 n = 1000 / ( 50 ? 20 ) = 1 n=1000/(50*20)=1 n=1000/(50?20)=1圈每秒。
由于C 和 F0是常數(shù),所以轉(zhuǎn)速n 跟 M1成反比。這就使得:
1、在高速時,編碼器脈沖間隔時間 TE很小,使得測量周期內(nèi)的高頻脈沖計數(shù)值 M1也變得很少,導(dǎo)致測量誤差變大
2、在低轉(zhuǎn)速時, TE足夠大,測量周期內(nèi)的 M1也足夠多,所以T法和M法剛好相反,更適合測量低速。
3、如下圖,黑色方波為編碼器某一通道輸出的脈沖,黃色方波為高頻測量脈沖。
4、當(dāng)轉(zhuǎn)速較低時,高頻測量脈沖數(shù) M1較大,可以得到較準確的轉(zhuǎn)速測量值。
當(dāng)轉(zhuǎn)速較高時,編碼器兩脈沖間的時間間隔變短,導(dǎo)致高頻測量脈沖數(shù) M1較小,由于高頻脈沖的上升沿位置與編碼器脈沖的上升沿不一定對應(yīng),當(dāng)兩波的上升沿位置不同時,會有一個脈沖的誤差。
轉(zhuǎn)速較高時,編碼器兩脈沖間的時間間隔變短") M/T法測速
M/T法測速
這種方法綜合了M 法和T 法各自的優(yōu)勢,既測量編碼器脈沖數(shù)又測量一定時間內(nèi)的高頻脈沖數(shù)。
在一個相對固定的時間內(nèi),假設(shè):
編碼器脈沖數(shù)產(chǎn)生 M0個 (測量值)
計數(shù)一個已知頻率為 F0(固定值,單位Hz)的高頻脈沖,計數(shù)值為 M1(測量值),計算速度值
碼器單圈總脈沖數(shù)為C(常數(shù))
則轉(zhuǎn)速n 的計算公式為: 在這里插入圖片描述 例如:在一個相對固定的時間內(nèi),編碼器脈沖數(shù) M0為3個;高頻脈沖的周期是1ms,即頻率 F0為1000Hz,產(chǎn)生的高頻脈沖數(shù) M1為150個;編碼器一圈的脈沖數(shù)C為20,則轉(zhuǎn)速 n = 1000 ? 3 / ( 150 ? 20 ) = 1 n=10003/(15020)=1 n=1000?3/(150?20)=1圈每秒。
由于M/T 法公式中的 F0 和C 是常數(shù),所以轉(zhuǎn)速n 就只受 M0和 M1的影響。
1、高速時, M0增大, M1減小,相當(dāng)于M 法
2、低速時, M1增大, M0減小,相當(dāng)于T 法。
沖數(shù) M=0為3個;高頻脈沖的周期是1ms,即頻率 F0 為1000Hz,產(chǎn)生的高頻脈沖數(shù) M1為150個;編碼器一圈的脈沖數(shù)C為20,則轉(zhuǎn)速 n = 1000 ? 3 / ( 150 ? 20 ) = 1 n=10003/(15020)=1 n=1000?3/(150?20)=1圈每秒。
由于M/T 法公式中的 F0和C 是常數(shù),所以轉(zhuǎn)速n 就只受 M0和 M1的影響。
1、高速時, M0增大, M1減小,相當(dāng)于M 法
2、低速時, M1增大, M0減小,相當(dāng)于T 法。

了解更多編碼器相關(guān)知識,敬請關(guān)注西安德伍拓自動化傳動系統(tǒng)有限公司網(wǎng)站。公司技術(shù)團隊為您免費提供
編碼器的選型、安裝、調(diào)試、保養(yǎng)等技術(shù)指導(dǎo)服務(wù),盡量避免企業(yè)因為編碼器技術(shù)人員的短缺帶來的損失,采取“線上+線下”服務(wù)的服務(wù)形式,幫助企業(yè)解決技術(shù)難題。




有限公司")
 在線QQ
在線QQ 186-2947-6872
186-2947-6872 在線咨詢
在線咨詢

 info@motion-control.com.cn
info@motion-control.com.cn