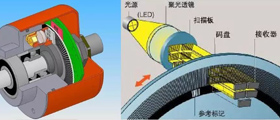
增量式光電編碼器基本波形及原理圖
增量編碼器是以脈沖形式輸出的傳感器。根據(jù)增量編碼器的原理圖,我們可以知道它的編碼盤比絕對編碼器的碼盤簡單得多,分辨率也更高。通常,只需要三個條形碼路徑。事實上,這里的代碼路徑不再具有絕對值編碼器代碼路徑的含義,而是生成計數(shù)脈沖。
根據(jù)增量編碼器的原理圖,碼盤的外部和中間通道具有相同的均勻分布的光透射和光透射扇形區(qū)域(網(wǎng)格),但兩個扇形區(qū)域彼此偏移一半。當(dāng)當(dāng)前碼盤旋轉(zhuǎn)時,其輸出信號是相差90°的A相和B相脈沖信號,以及由只有一個透明槽的第三碼通道產(chǎn)生的脈沖信號(作為碼盤的參考位置,它為計數(shù)系統(tǒng)提供初始零信號)。

根據(jù)增量編碼器的電路圖A和B,旋轉(zhuǎn)方向可以由兩個輸出信號的相位關(guān)系(超前或滯后)確定。(a) 可以看出,當(dāng)碼盤向前旋轉(zhuǎn)時,通道a的脈沖波形在通道B的脈沖波形之前是π/2,而通道a的脈搏波形在通道C的脈沖波形之后是π/2。圖中(B)是一個實際電路。由單穩(wěn)態(tài)觸發(fā)的、由觸發(fā)波形波的下邊緣觸發(fā)的正脈沖與B形波相結(jié)合。如果當(dāng)前代碼盤向前旋轉(zhuǎn),則只輸出正部分,否則只輸出反部分。
因此,根據(jù)增量編碼器原理圖中的輸出脈沖源和脈沖數(shù)確定碼盤的旋轉(zhuǎn)方向和相對角位移。通常,當(dāng)編碼器具有N個(碼信道)輸出信號時,其相位差為p/N,可計數(shù)脈沖為2N。當(dāng)前雙網(wǎng)格數(shù)量N=2。圖中中電路的缺點是它有時會產(chǎn)生錯誤的存儲脈沖,從而導(dǎo)致錯誤。當(dāng)一個信號處于高電平或低電平而另一個信號處在高電平和低電平時,就會發(fā)生這種情況。此時,雖然碼盤沒有位移,但它會產(chǎn)生單邊輸出脈沖。例如,如果碼盤抖動或手動對齊位置(這可以在重力儀測量期間看到)。
了解更多
光電編碼器相關(guān)知識,敬請關(guān)注西安德伍拓自動化傳動系統(tǒng)有限公司網(wǎng)站。公司技術(shù)團(tuán)隊為您免費(fèi)提供編碼器的選型、安裝、調(diào)試、保養(yǎng)等技術(shù)指導(dǎo)服務(wù),盡量避免企業(yè)因為編碼器技術(shù)人員的短缺帶來的損失,采取“拉線上+拉線下”服務(wù)的服務(wù)形式,幫助企業(yè)解決技術(shù)難題。








有限公司")
 在線QQ
在線QQ 186-2947-6872
186-2947-6872 在線咨詢
在線咨詢

 info@motion-control.com.cn
info@motion-control.com.cn