增量
光電編碼器故障診斷
增量光電編碼器具有分辨率高、精度高、設計簡單等優(yōu)點,是理想的速度傳感器,廣泛應用于現有大多數電機控制系統(tǒng)中電機的實時速度測量。增量光編碼器的故障會引起嚴重的故障,一旦增量光編碼器發(fā)生故障,所以反饋電機轉速不正確,就會導致電機轉速進一步升高,電機過熱,甚至發(fā)生嚴重事故,燒毀電機或變頻器。因此,增量光電編碼器的故障診斷對于具有速度反饋的電機控制器尤為重要。本文考察了增量光編碼器的故障診斷,實時檢測增量光編碼器的工作狀態(tài),從光編碼器抽取兩相方波脈沖信號AB輸出,評估并指示增量光編碼器是否失效,并在實驗故障診斷平臺上對本文提出的方法進行實驗研究, 結果表明,本文提出的診斷算法簡單,診斷精度高。

增量編碼器的工作原理
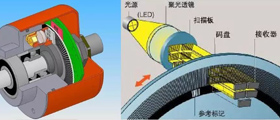
增量光電編碼器主要由光源、碼盤、檢測光柵、光電檢測元件和轉換電路組成,如圖1所示。碼盤上刻有等間距的徑向透射狹縫,相鄰的兩個透光狹縫(A組和B組)之間刻有增量周期檢測光柵,碼盤的相應透光狹縫用于在光源和光電檢測裝置之間透射或阻擋光線。
當碼盤隨被測旋轉軸旋轉時,檢測光柵不動,光線通過碼盤和檢測光柵上的縫隙照射到光電檢測裝置,光電檢測裝置輸出兩組電信號,相位差為90“的正弦波像電角, 并且電信號通過轉換電路的信號處理發(fā)出方波,可以獲得被測軸的旋轉角度或速度信息。增量光電編碼器的輸出信號波形如圖2所示
增量編碼器故障分析
增量編碼器是一種高精度儀器,往往由于機械裝配的原因,導致碼盤損壞或網格未對準,結果速度反饋信號有不同程度的偏差,嚴重時甚至會導致整個電機控制系統(tǒng)的故障,導致不必要的故障和損失。
理論上,未損壞的增量光電編碼器通過組合光源(即光單元和光柵)輸出連續(xù)占空比為50%的方波信號。如果光檢測設備損壞,將輸出不規(guī)則波形,如圖3所示。
增量編碼器故障診斷方法設計
光增量編碼器輸出的兩相A和B信號的上升和下降方向數分別計算。由于在正常情況下增量光電編碼器的分辨率為N,即每次電機旋轉時,傳感單元檢測N個脈沖序列,每個脈沖序列包含1個上升和1個下降,因此傳感單元最終檢測到2N個電平變化。因此,發(fā)動機的總轉數可以根據每單位時間內記錄的水平變化總數(即上升和下降側翼數的總和)來計算。然后計算光電編碼器輸出的兩相A和B信號的上升度和下降度總數之間的差值。設光電編碼器輸出的A相信號的上升和下降治理總數NA,以及光電編碼器輸出的B相信號的上升和下降治理總數NBA,兩相B信號的上升沿和下降沿總數之差為ON。
在光電編碼器發(fā)生缺相的情況下,這里建議假設相位A故障,電機的總旋轉圓NT可以從正常工作時B相信號的上升沿和下降槽總數計算出來。
上升沿與兩相信號A和B的下降匝數總數之差是AN與電機總轉數NT的比值,即相位信號A在電機一圈循環(huán)中不存在的電平變化次數。
普通光電編碼器具有固有故障,兩相A和B信號的上升沿和下降沿總數之間的差異應在正常條件下進行實驗測量。最后,在實測統(tǒng)計結果的基礎上,考慮到故障診斷系統(tǒng)的魯棒性,可將光電編碼器的最大允許故障值設置為6
如果電機一轉周期內A相信號缺席的電平變化數小于光電編碼器8的最大允許故障值,則光電編碼器正常,反之亦然,光電編碼器有缺陷。綜上所述,光電編碼器故障No>8(4)的評估條件
檢測到光電編碼器中的故障后,將設置一個錯誤標志,指示光電編碼器的故障狀態(tài)。
增量編碼器實驗研究
在故障診斷實驗平臺上,對本文提出的方法進行實驗研究,選取增量光電編碼器作為研究對象,碼盤網格的分辨率為N = 1000。允許的最大故障值為 8 = 10。對于處于正常和故障狀態(tài)的編碼器,表1中的數據Ng=1.09<10和實驗數據表1的表2表明光電編碼器工作正常。 表2中的數據N=436.92>10表明光電編碼器有缺陷。
本文提出的光電編碼器檢測裝置故障診斷方法簡單穩(wěn)定,能夠獲得準確的診斷結果,具有實際的工業(yè)應用價值。
了解更多
增量編碼器相關知識,敬請關注西安德伍拓自動化傳動系統(tǒng)有限公司網站。公司技術團隊為您免費提供編碼器的選型、安裝、調試、保養(yǎng)等技術指導服務,盡量避免企業(yè)因為編碼器技術人員的短缺帶來的損失,采取拉線上+拉線下服務的服務形式,幫助企業(yè)解決技術難題。


有限公司")
 在線QQ
在線QQ 186-2947-6872
186-2947-6872 在線咨詢
在線咨詢

 info@motion-control.com.cn
info@motion-control.com.cn