如何減少
磁編碼器的角度誤差?
磁編碼器在旋轉軸中心、永磁體和霍爾元件中心位于同一直線上的軸端配置中,理論上是一個完美的圓,并且角度誤差為零。但實際上,由于某些原因,圖形不再是完美的圓,從而導致角度誤差。

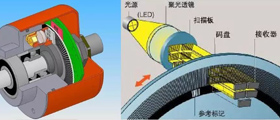
下面,西安德伍拓自動化技術人員將為大家解釋使用磁性編碼器的離軸配置的工作原理,磁性編碼器由徑向磁化的磁體和檢測水平磁場強度的霍爾元件組成。
磁編碼器周邊有雜散磁場
由于從永磁體水平方向輸入的雜散磁場的影響,會產生角度誤差。
例如,如果在X軸方向輸入雜散磁場,則的中心將在X軸方向偏移。此時,當旋轉角度θ為0°和180°時,角度誤差為零,但在其他情況下都會出現角度誤差。
磁編碼器霍爾元件的安裝不對中
由于霍爾元件的安裝未對準而產生角度誤差。這是因為,由于霍爾元件和永磁體的中心發生位移,輸入到霍爾元件的磁場發生畸變。
例如,如果霍爾元件在X軸方向上未對準,則當旋轉角度θ為0°、90°、180°或270°時,角度誤差為0。
然而,在0~90°和180~270°之間相位超前,在90~180°和270~0°之間相位滯后。
磁編碼器霍爾元件的安裝傾斜度
由于霍爾元件的安裝傾斜而產生角度誤差。霍爾元件和永磁體并沒有相互偏移,但由于從傾斜方向輸入的磁場變弱,變成橢圓。例如,當霍爾元件相對于X軸方向傾斜時,當旋轉角度θ為0°和180°時,輸入到霍爾元件的磁場變弱。而在 90° 和 270° 時,磁場強度不受傾斜的影響。結果,變成X方向上半徑較小的橢圓。在這種情況下,當旋轉角度θ為0°、90°、180°和270°時,角度誤差為0。然而,在0~90°和180~270°之間相位超前,在90~180°和270~0°之間相位滯后。
相反,如果霍爾元件安裝在正確的位置,即使永磁體未對準或傾斜,也不會出現角度誤差。這是因為,即使磁鐵錯位地旋轉,輸入到霍爾元件的磁場的大小也不會根據角度而變化。結果,李薩如圖形保持完美的圓形,并且不會出現角度誤差。
然而,磁編碼器檢測到的水平磁場的大小變小,因此角度信息中包括的噪聲誤差分量變得相對較大。
磁編碼器和電子元件的特性偏差
組成磁性編碼器的霍爾元件和AD轉換器都是電子元件。量產電子零件的電子特性因生產偏差而存在個體差異。
例如,霍爾元件的偏移會導致角度誤差,其原因與雜散磁場的影響相同。用于檢測 X 軸分量磁場的霍爾元件的靈敏度與用于檢測 Y 軸分量磁場的霍爾元件的靈敏度之間的差異會導致角度誤差,其原因與安裝傾斜度相同霍爾元件。同樣,AD轉換器的偏移和靈敏度偏差也會導致角度誤差。
了解更多
磁性編碼器相關知識,敬請關注西安德伍拓自動化傳動系統有限公司網站。公司技術團隊為您免費提供編碼器的選型、安裝、調試、保養等技術指導服務,盡量避免企業因為編碼器技術人員的短缺帶來的損失,采取拉線上+拉線下服務的服務形式,幫助企業解決技術難題。

 在線QQ
在線QQ 186-2947-6872
186-2947-6872 在線咨詢
在線咨詢

 info@motion-control.com.cn
info@motion-control.com.cn