編碼器在大型船舶龍門起重機中的應用
針對大型船舶龍門起重機承載能力大、跨度大、起升高度高的特點,這里為大家介紹編碼器在起重機閉環同步控制和行程測量中的應用,使起重機能夠安全可靠地工作。對同類起重機的設計具有參考和借鑒意義。
摘要
大型船舶龍門起重機(以下簡稱船舶龍門起重機)作為碼頭區停工不可或缺的起重設備,已朝著超大跨度、超大承載能力的方向發展。目前,我國大型造船龍門起重機的承載能力達到1600噸,跨度230米,起吊高度100米。這對起重機操作中控制位置的同步定位和安全工作提出了更高的要求。龍門起重機跨度大,結構形狀的剛性支腿和柔性支腿導致腹板兩側異步運行,容易發生安全事故。龍門起重機吊裝高度大,給定位吊裝作業帶來很大困難。編碼器可用于定位、速度和長度測量,廣泛應用于大型造船龍門起重機
編碼器簡介
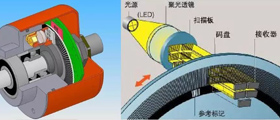
編碼器是一種將物理量轉換為數字格式的傳感器,用于檢測物體機械運動的速度、位置、角度和計數。運動控制器中旋轉編碼器的功能是將位置和角度等參數轉換為數字量。可以使用諸如電接觸、磁效應、電容效應和光電轉換之類的機制來形成不同類型的編碼器。運動控制系統中最常見的編碼器是光電編碼器。光電子編碼可以分為增量編碼器和絕對編碼器。兩者通常用作速度控制或位置控制中的檢測部件。
增量編碼器
增量編碼器直接利用光電轉換原理輸出A、B、Z三組方波脈沖。兩個脈沖組A和B之間的相位差為90°,因此可以很容易地確定旋轉方向。Z相每轉輸出一個脈沖用于參考點定位。當編碼器旋轉時,它會發出脈沖,并通過計數設備知道它的位置和速度。當編碼器靜止或關閉時,依靠計數器的內部存儲器來記住其位置。通過這種方式,編碼器在電源故障后不能以任何方式移動。如果有當前調用,編碼器的輸出脈沖過程中應該沒有干擾,并且脈沖不應該丟失。否則,由計數裝置存儲的零點偏移,并且偏移量可能是未知的。只有當出現錯誤的生產結果時,才能知道。其優點是結構簡單,平均使用壽命長,抗干擾能力強,可靠性高,適用于連續操作和高精度定位控制。其缺點是不能輸出波旋轉的絕對位置信息。
絕對值編碼器
絕對編碼器是一種直接輸出數字量的傳感器。在圓形碼盤上,沿徑向有幾個同心的碼道,每個都由透明和不透明的扇區區域組成。相鄰代碼軌道的數量是雙重關系,代碼盤上的代碼軌道數量是二進制數字的數量。絕對編碼器根據其機械位置來確定每個位置的唯一性。它不需要內存、參考點和連續計數。如果需要知道位置,他會讀取位置。這顯著提高了編碼器的抗干擾性能和數據可靠性。由于絕對編碼器相對于增量編碼器在定位方面的顯著優勢,它們越來越多地用于機械運動定位。其優點是可以直接讀取角坐標的絕對值,而不會累積誤差,并且在關閉電源后不會丟失位置信息。然而,分辨率由二進制系統中的位數決定,精度取決于位數。
因此,增量編碼器和絕對編碼器之間的區別在于,增量編碼器將位移轉換為周期性電信號,然后將其轉換為計數脈沖。脈沖的數量用于表示偏移的大小,但只能在打開時存儲,而絕對編碼器的每個位置都對應于特定的數字代碼。其指示僅指測量的開始和結束位置,與測量的中間過程無關。而且它有內置存儲器,可以在斷電時存儲計數值。因此,絕對值編碼器更昂貴。如果編碼器的計數存儲器安裝在電子控制中,則可以使用增量編碼器來代替絕對編碼器。
編碼器實現閉環和同步控制
由于大型造船龍門起重機吊裝工藝的要求,通常在上車架上放置兩套起重機構進行配合,同時與下車架的起重機構一起進行吊裝和倒置,對吊裝的同步性要求較高。在變頻電氣控制中,增量編碼器通常用于電機的同軸安裝。編碼器的儀表和輸出連接到電子控制系統,用于閉環調節。電子控制系統可以通過調節閉環控制來精確控制電機速度,達到精確控制機構速度的效果。當兩組相似的機構需要同步時,電子控制系統可以通過雙閉環系統實現機構速度的同步,以確保提升和提升的安全。同時,這種控制方法也被用于行走機構中,以確保同步和安全行走。
大型造船龍門起重機的行程測量主要包括測量行程高度和測量行程距離,而行程測量一般使用絕對編碼器。原則上,電機同軸編碼器也可以進行行程測量。但不建議使用。一方面,雖然電機和機構在安裝完成時形成線性關系,但在維修過程中拆卸或調整時,轉速和驅動位置之間的對應比例可以改變,這也可以通過調整電子控制系統的參數或重新設置限制來解決;另一方面,用于電機的通用同軸編碼器使用增量編碼器,在電源故障的情況下,增量編碼器可能會失去其驅動位置。也可以安裝內部存儲來解決這個問題。但這些方法不如絕對值編碼器可靠。
所有編碼器行程測量都是通過測量傳動鏈中的轉數或角度并將其轉換為速度輸出來實現的。行程位置由編碼器在傳動鏈中的位置與待測量行程之間的線性關系確定。機構的速度也可以通過與系統中的時間參數進行比較來確定。同時,在上述類型中也可以獲得一些特殊的控制參數。

用于測量提升高度的旋轉編碼器通常安裝在提升絞車卷筒的軸端,與卷筒轉數成線性比例。如圖1所示,齒輪箱轉向和鼓通過離合器連接。齒輪箱轉向箱輸出端的一側安裝有旋轉編碼器,用于測量行程高度,另一側安裝有行程高度限制器,用于限制終點。如果卷筒是多層纏繞機,編碼器的轉速和提升高度不是線性連接的。如果層數發生變化,可能會發生突然的變化。設置程序時,有必要根據轉數確定鋼絲繩的位置,調整比例,并準確測量提升高度。除了吊鉤的高度測量外,在多鉤系統中,提升高度測量還起到提升行程的同步功能。行程高度測量誤差可以通過使用低于行程高度的減速位置或增加路徑中心的極限位置來重置。
起重機行程測量
門式起重機兩側的起重機運行系統均配有行程測量裝置。一方面,它可以提供系統驅動信號,以確定起重機在軌道上的位置;另一方面,系統可以比較兩側的路徑來控制驅動同步誤差,以避免由于兩側操作的大偏差而導致結構過載或脫軌。

傳統的大型車輛行駛路徑測量通常使用獨立的檢測輪,編碼器安裝在檢測輪的同軸軸上。由于獨立檢測輪重量較輕,很容易發生跳動或打滑,導致測量誤差。編碼器現在安裝在同軸從動輪上,沒有法蘭,如圖2所示。
對于大面積龍門起重機,使用多組檢查輪進行校準,以確保測量精度。同時,沿軌道校準位置設置限位開關觸發點。極限觸發系統將行進路徑測量系統的行進值校正到該位置的對應值,以便校正行進路徑測量體系中的誤差并減少誤差累積。3) 小型車行駛測量相當于測量大型車的軌跡,不同之處在于小型車的路徑比大型車的路徑小得多,小型車通常沒有動力車輪。小型汽車對環境的影響低于大型汽車。在實踐中,當汽車沒有動力車輪時,通常使用獨立的檢測車輪。由于汽車良好的運行環境,獨立檢測輪在行程測量中也起到了很好的作用。小型汽車的位移測量不僅起到定位功能的作用,而且還起到在兩個或多個小型汽車系統中操作的同步功能。小型汽車的位置測量也可以作為電子控制系統中物體碰撞保護的參數。
小結
本文分析了編碼器的功能和分類,西安德伍拓自動化為大家介紹了編碼器在大型船舶龍門起重機中的具體應用,它可以準確地進行閉環控制、同步控制和行程測量,使龍門起重機能夠可靠、安全地工作。本文提出的編碼器控制方法已在幾臺大型船舶龍門起重機上應用,取得了良好的效果。
了解更多
起重機編碼器相關知識,敬請關注西安德伍拓自動化傳動系統有限公司網站。公司技術團隊為您免費提供編碼器的選型、安裝、調試、保養等技術指導服務,盡量避免企業因為編碼器技術人員的短缺帶來的損失,采取拉線上+拉線下服務的服務形式,幫助企業解決技術難題。

 在線QQ
在線QQ 186-2947-6872
186-2947-6872 在線咨詢
在線咨詢

 info@motion-control.com.cn
info@motion-control.com.cn